

यो सामान्यतया विश्वास गरिन्छ कि यदि बेल्ट कन्वेयर ड्राइभ उपकरण कन्फिगरेसन धेरै उच्च छ भने, यो स्रोतको बर्बादी हो। जे होस्, ठूला उपकरणहरूको लागि, यदि यो धेरै कम छ भने, यसले बेल्ट सुरु गर्दा गतिशील तनाव बढाउनेछ, र बेल्टलाई प्रतिध्वनित गर्न पनि निम्त्याउँछ। बेल्ट कन्वेयरको डिजाइनमा ड्राइभिङ उपकरणलाई कसरी उचित रूपमा चयन गर्ने कुञ्जी हो। यो पनि एक प्रमुख मुद्दा हो कि डिजाइन उचित छ, सञ्चालन सामान्य छ, र मर्मत लागत र मर्मत मात्रा कम छ। यस लेखले सन्दर्भको लागि धेरै सामान्य ड्राइभिङ विधिहरूको अनुप्रयोगहरू, फाइदाहरू र बेफाइदाहरूको विश्लेषण गर्दछ।

1. इलेक्ट्रिक रोलर
इलेक्ट्रिक ड्रमहरू बिल्ट-इन इलेक्ट्रिक ड्रमहरू र बाह्य इलेक्ट्रिक ड्रमहरूमा विभाजित छन्। तिनीहरू बीचको मुख्य भिन्नता भनेको बिल्ट-इन इलेक्ट्रिक ड्रमको मोटर ड्रम भित्र स्थापित हुन्छ, जबकि बाह्य इलेक्ट्रिक ड्रमको मोटर ड्रमको बाहिर स्थापित हुन्छ र कडा रूपमा ड्रमसँग जोडिएको हुन्छ।
बिल्ट-इन इलेक्ट्रिक ड्रममा तातो खपत कम हुन्छ किनभने मोटर ड्रम भित्र स्थापित हुन्छ। यो सामान्यतया 30kw भन्दा कम शक्ति र 150m भन्दा कम को लम्बाइ संग बेल्ट कन्वेयर मा प्रयोग गरिन्छ। किनभने मोटर ड्रम बाहिर स्थापित छ, बाह्य विद्युत ड्रम राम्रो गर्मी अपव्यय छ। यो सामान्यतया 45kw भन्दा कम शक्ति र 150m भन्दा कम लम्बाइको बेल्ट कन्वेयरहरूमा प्रयोग गरिन्छ।
फाइदाहरू: कम्प्याक्ट संरचना, कम मर्मत लागत, उच्च विश्वसनीयता, ड्राइभिङ उपकरण र ट्रान्समिशन रोलर एकमा एकीकृत छन्।
बेफाइदाहरू: खराब सफ्ट स्टार्ट प्रदर्शन, मोटर सुरु हुँदा पावर ग्रिडमा ठूलो प्रभाव। विश्वसनीयता Y-प्रकार मोटर + युग्मन + रिड्यूसर ड्राइभ विधि भन्दा खराब छ।
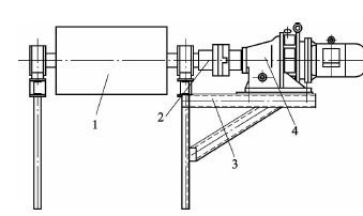
2. Y-प्रकारको मोटर + कपलिङ + रिड्यूसरको खराब ड्राइभिङ मोड
फाइदाहरू: साधारण संरचना, सानो मर्मत कार्यभार, कम मर्मत लागत र उच्च विश्वसनीयता।
बेफाइदाहरू: खराब सफ्ट स्टार्ट प्रदर्शन, मोटर सुरु हुँदा पावर ग्रिडमा ठूलो प्रभाव। सामान्यतया 45kw भन्दा कम शक्ति र 150m भन्दा कम लम्बाइ भएको बेल्ट कन्वेयरहरूमा प्रयोग गरिन्छ।
3. Y-प्रकारको मोटर + टर्क सीमित गर्ने तरल पदार्थ युग्मन + रिड्यूसर
यो बेल्ट कन्वेयरहरूमा व्यापक रूपमा प्रयोग हुने ड्राइभिङ उपकरण हो, जुन सामान्यतया 630kw भन्दा कमको एकल पावर र 1500m भन्दा कम लम्बाइ भएको बेल्ट कन्वेयरहरूमा प्रयोग गरिन्छ।
आयताकार-सीमित तरल पदार्थ युग्मनलाई पछाडि सहायक कक्षको साथ एक आयत-सीमित तरल पदार्थ युग्मन र पछाडि सहायक कक्ष बिना आयत-सीमित तरल पदार्थ युग्मनमा विभाजित गरिएको छ। किनभने पहिले मोटर सुरु हुँदा थ्रॉटल प्वाल मार्फत थ्रॉटल प्वाल मार्फत फ्लुइड कपलिंगको काम गर्ने गुहामा प्रवेश गर्छ, यसको सुरुवाती कार्यसम्पादन पछिल्लोको भन्दा राम्रो हुन्छ।
यदि तरल युग्मनका दुई मोडेलहरूले यसको प्रसारण शक्ति पूरा गर्न सक्ने, तरल युग्मनको लामो समय र ठूलो तातो उत्पादनको कारणले गर्दा पछाडिको सहायक कक्ष चयन गरिएको छ भने, तरल युग्मनको ठूलो प्रकारलाई प्राथमिकता दिनुपर्छ।
यदि पछाडिको सहायक कक्ष बिनाको एउटा चयन गरिएको छ भने, तरल युग्मनका दुई मोडेलहरूले यसको प्रसारण शक्ति पूरा गर्न सक्ने अवस्थामा, तरल युग्मनको सुरूवात समय छोटो र तातो उत्पादन कम हुने भएकाले सानो प्रकारको तरल युग्मनलाई प्राथमिकता दिनुपर्छ।
धेरै मोटरहरूद्वारा सञ्चालित बेल्ट कन्भेयरहरूका लागि, यदि यो ड्राइभ विधि चयन गरिएको छ भने, यो रियर सहायक च्याम्बर टर्क सीमित प्रकारको फ्लुइड कपलिंगको साथ फ्लुइड युग्मन छनौट गर्न सिफारिस गरिन्छ।
फाइदाहरू: लागत-प्रभावी, सरल र कम्प्याक्ट संरचना, सानो मर्मत कार्यभार, कम मर्मत लागत, सुरक्षा मोटर ओभरलोड, जब धेरै मोटरहरू चलाइन्छ, मोटर पावर सन्तुलित गर्न सकिन्छ, ढिलाइ सुरुलाई स्टेशनहरूमा विभाजन गर्न सकिन्छ, र बेल्ट कन्भेयर सुरु हुँदा पावर ग्रिडमा प्रभाव कम हुन्छ, विश्वसनीयता कम हुन्छ, मूल्य कम हुन्छ, प्रिभिङ मोडको लागि मूल्य कम हुन्छ। 1500m भन्दा कम को लम्बाइ संग कन्वेयर।
हानिहरू: सफ्ट स्टार्ट प्रदर्शन खराब छ, र यो बेल्ट कन्वेयरको लागि डाउनवर्ड ट्राफिक बेल्ट कन्वेयरको लागि प्रयोग गर्न उपयुक्त छैन, र बेल्ट कन्वेयर जसलाई गति नियमन प्रकार्य चाहिन्छ।
4. Y-प्रकारको मोटर + स्पीड-रेगुलेटिङ फ्लुइड कपलिंग + रिड्यूसर
ठूला बेल्ट कन्भेयरहरूका लागि सामान्यतया प्रयोग गरिने ड्राइभिङ विधि, जुन सामान्यतया 800 मिटरभन्दा बढी लम्बाइ भएको लामो दूरीका ठूला बेल्ट कन्वेयरहरूमा प्रयोग गरिन्छ।
फाइदाहरू: संरचना सरल छ, ओभरलोड मर्मत कार्यभार सानो छ, मोटर बिना लोडमा सुरु हुन्छ, मोटर ओभरलोड हुन्छ, जब धेरै मोटरहरू चलाइन्छ, यो सुरु गर्न ढिलाइ हुन सक्छ, पावर ग्रिडमा बेल्ट कन्भेयरको प्रभाव कम गर्दा यो सुरु हुन्छ, विश्वसनीयता उच्च छ, सफ्ट स्टार्ट कार्यसम्पादन राम्रो छ, र यो स्टार्टअप समय नियन्त्रण गर्न योग्य छ। नियन्त्रणयोग्य, स्टार्ट-अप गति वक्र नियन्त्रण योग्य छ, र मूल्य कम छ।
बेफाइदाहरू: जब तरल पदार्थ युग्मन सुरु हुन्छ, तरल युग्मनको काम गर्ने गुहाको तेल भोल्युम परिवर्तन र गति परिवर्तन वक्र गैर-रैखिक हुन्छ र पछाडि पछाडी हुन्छ, नियन्त्रणयोग्य गतिशील प्रतिक्रिया ढिलो हुन्छ, र बन्द-लूप नियन्त्रण गर्न गाह्रो हुन्छ, र कहिलेकाहीँ त्यहाँ तेल चुहावट हुन्छ। यो डाउनवर्ड कन्वेयर बेल्ट कन्वेयरको लागि उपयुक्त छैन, र गति नियमन प्रकार्यको साथ बेल्ट कन्वेयर आवश्यक छ।

5. Y-प्रकारको मोटर + CST ड्राइभ उपकरण
Y-प्रकारको मोटर + CST ड्राइभ यन्त्र संयुक्त राज्यको डज कम्पनीद्वारा बेल्ट कन्वेयरको लागि डिजाइन गरिएको हो, मेकाट्रोनिक्स ड्राइभ यन्त्रको उच्च विश्वसनीयताको साथ, सामान्यतया 1000 मिटरभन्दा बढी लम्बाइ भएको लामो दूरीको ठूलो बेल्ट कन्वेयरमा प्रयोग गरिन्छ।
फाइदाहरू: राम्रो सफ्ट स्टार्ट कार्यसम्पादन, सुरु गर्दा रैखिक र नियन्त्रण योग्य गति कर्भ, पार्किङ गर्दा नियन्त्रित गति कर्भ, बन्द-लूप नियन्त्रण गर्न सकिन्छ, मोटर नो-लोड सुरु, साधारण संरचना, सानो मर्मत कार्यभार, जब धेरै मोटरहरू चलाइन्छ, यो चरणहरूमा सुरु गर्न ढिलाइ हुन सक्छ, र GR सुरु गर्दा बेल्ट कन्भेयरको प्रभाव कम गर्न सकिन्छ।
बेफाइदाहरू: मर्मत कार्यकर्ता र स्नेहन तेल, उच्च उपकरण मूल्य लागि उच्च आवश्यकताहरू। यो डाउनवर्ड कन्वेयर बेल्ट कन्वेयरको लागि उपयुक्त छैन, र गति नियमन प्रकार्यको साथ बेल्ट कन्वेयर आवश्यक छ।
6. घुमाउरो मोटर + रिड्यूसर
घुमाउरो मोटर + रिड्यूसरको तीनवटा नियन्त्रण मोडहरू छन्:
पहिलो प्रकार: घाउ मोटर स्ट्रिङ आवृत्ति प्रतिरोध वा पानी प्रतिरोध;
त्यहाँ कुनै गति नियमन प्रकार्य छैन, र मोटर बारम्बार सुरु गर्न सकिँदैन, सामान्यतया 500 मिटर भन्दा बढी लम्बाइ भएको बेल्ट कन्वेयरमा प्रयोग गरिन्छ र मोटर बारम्बार सुरु हुँदैन।
दोस्रो प्रकार: तार-घाउ मोटर स्ट्रिङ धातु अवरोध;
त्यहाँ कुनै गति नियमन प्रकार्य छैन, तर मोटर बारम्बार सुरु गर्न सकिन्छ, र thyristor शक्ति संग ब्रेक पछि, यो तल बेल्ट कन्वेयर को लागी एक सामान्य ड्राइभिङ विधि हो।
तेस्रो प्रकार: घुमाउरो मोटरको क्यास्केड गति नियमन।
यसमा गति नियमन को कार्य छ, बन्द-लूप नियन्त्रण को लागी प्रयोग गर्न सकिन्छ, र सामान्यतया 1000m भन्दा लामो दूरी र एक गति नियमन प्रकार्य संग ठूलो बेल्ट कन्वेयर मा प्रयोग गरिन्छ।
फाइदाहरू: पहिलो र दोस्रो नियन्त्रण विधिहरू, सरल संरचना, सानो मर्मत कार्यभार, राम्रो सफ्ट स्टार्ट प्रदर्शन, कम मूल्य, सुरु गर्दा पावर ग्रिडमा सानो प्रभाव, उच्च विश्वसनीयता, राम्रो नियन्त्रण योग्य प्रदर्शन; तेस्रो नियन्त्रण मोडमा उत्कृष्ट पावर ब्रेकिङ प्रदर्शन छ।
बेफाइदाहरू: पहिलो र दोस्रो नियन्त्रण मोडहरू सुरु र रोक्दा ठूलो ऊर्जा खपत हुन्छ; तेस्रो नियन्त्रण मोड प्रणाली जटिल छ, र त्यहाँ एक वैकल्पिक आवृत्ति वा वैकल्पिक आवृत्ति द्वारा प्रतिस्थापन गर्ने प्रवृत्ति छ।
7. उच्च गति DC मोटर + रिड्यूसर
गति नियमन प्रकार्यको साथ ड्राइभ मोड, जुन सामान्यतया ठूला बेल्ट कन्वेयरहरूमा प्रयोग गरिन्छ जसलाई गति नियमन प्रकार्य चाहिन्छ।
फाइदाहरू: राम्रो सफ्ट स्टार्ट प्रदर्शन, सुरु गर्दा रैखिक नियन्त्रण योग्य गति कर्भ, पार्किङ गर्दा रैखिक नियन्त्रण योग्य गति वक्र, राम्रो विद्युतीय ब्रेकिङ प्रदर्शन, स्टेपलेस गति परिवर्तन, उत्कृष्ट नियन्त्रण योग्य प्रदर्शन, बन्द-लूप नियन्त्रण गर्न सक्छ, उच्च विश्वसनीयता।
बेफाइदाहरू: मूल्य धेरै महँगो छ, थाइरिस्टर रेक्टिफायर प्रणाली जटिल छ, इलेक्ट्रोनिक नियन्त्रण उपकरणले ठूलो क्षेत्र समेट्छ, पावर फ्याक्टर कम छ, DC मोटरमा स्लिप रिंगहरू छन्, ब्रश लगाउने ठूलो छ, मर्मत कार्यको भार ठूलो छ, हाल कुनै विस्फोट-प्रूफ प्रकार छैन, र यो कोइला खानीहरूमा प्रयोग गर्न सकिँदैन।

8. कम गतिको DC मोटरले बेल्ट कन्वेयरको ड्राइभ रोलरलाई सीधै चलाउँछ
गति नियमन प्रकार्यको साथ ड्राइभिङ मोड सामान्यतया ठूलो बेल्ट कन्वेयरमा प्रयोग गरिन्छ जसमा गति नियमन प्रकार्य र 1000kw भन्दा ठूलो एकल मोटर पावर भएको बेल्ट कन्वेयर आवश्यक हुन्छ।
फाइदाहरू: उत्कृष्ट सफ्ट स्टार्ट प्रदर्शन, सुरु गर्दा रैखिक नियन्त्रण योग्य गति कर्भ, पार्किङ गर्दा रैखिक नियन्त्रण योग्य गति वक्र, राम्रो विद्युतीय ब्रेकिङ प्रदर्शन, स्टेपलेस गति परिवर्तन, उत्कृष्ट नियन्त्रण योग्य प्रदर्शन, बन्द-लूप नियन्त्रण, कुनै रिड्यूसर, उच्च विश्वसनीयता।
बेफाइदाहरू: मूल्य धेरै महँगो छ, थाइरिस्टर रेक्टिफायर प्रणाली जटिल छ, इलेक्ट्रोनिक नियन्त्रण उपकरणले ठूलो क्षेत्र समेट्छ, पावर फ्याक्टर कम छ, DC मोटरमा स्लिप रिंगहरू छन्, ब्रश पहिरन ठूलो छ, मर्मत कार्यभार ठूलो छ, र हालको उच्च-शक्ति गैर-विस्फोट-प्रूफ प्रकार कोइला खानीमा प्रयोग गर्न सकिँदैन।
9. आवृत्ति रूपान्तरण गति विनियमित मोटर + रिड्यूसर
त्यहाँ आवृत्ति रूपान्तरण गति मोटर + रिड्यूसरको लागि दुई नियन्त्रण विधिहरू छन्:
पहिलो प्रकार: प्रतिच्छेदन र वैकल्पिक आवृत्ति रूपान्तरण
वैकल्पिक फ्रिक्वेन्सी रूपान्तरण प्रणालीको पावर कारक कम छ, र स्टार्ट-अप र अपरेशनको समयमा ठूलो संख्यामा उच्च-अर्डर हार्मोनिक्सहरू उत्पन्न हुनेछन्, जसले पावर ग्रिडमा प्रदूषण निम्त्याउनेछ। मोटरको बारम्बार स्टार्टले पावर ग्रिडमा ठूलो प्रतिक्रियात्मक शक्ति प्रभाव पार्छ, जुन व्यापक रूपमा व्यवस्थित हुनुपर्छ। फ्रिक्वेन्सी रूपान्तरण उपकरणमा लगानी अपेक्षाकृत कम छ।
दोस्रो प्रकार: इन्टरचेन्ज एक वैकल्पिक आवृत्ति रूपान्तरण भएको छ
वैकल्पिक फ्रिक्वेन्सी रूपान्तरण प्रणाली यन्त्रमा फिल्टर एकाइ र क्षतिपूर्ति एकाइ संग सुसज्जित छ भन्ने तथ्यको कारण, पावर कारक 0.9 भन्दा ठूलो छ, उच्च हार्मोनिक घटक धेरै सानो छ, र यसले हार्मोनिक प्रदूषण पैदा गर्दैन, र हार्मोनिक अवशोषण र प्रतिक्रियाशील सेटअप गर्न आवश्यक छैन तर एकल पावर क्षतिपूर्ति यन्त्र भन्दा ठूलो छ। फ्रिक्वेन्सी रूपान्तरण प्रणाली हाल चीनमा उत्पादन गर्न सकिँदैन, र उपकरण र स्पेयर पार्ट्स आयात गर्नुपर्छ, जुन पहिलो लगानीमा अपेक्षाकृत उच्च छ। यो सामान्यतया ठूला बेल्ट कन्वेयरहरूमा प्रयोग गरिन्छ जुन गति नियमन कार्यहरू आवश्यक पर्दछ।
फाइदाहरू: उत्कृष्ट सफ्ट स्टार्ट प्रदर्शन, सुरु गर्दा रैखिक नियन्त्रण योग्य गति वक्र, पार्किङ गर्दा रैखिक नियन्त्रण योग्य गति वक्र, राम्रो विद्युतीय ब्रेकिङ प्रदर्शन, स्टेपलेस गति परिवर्तन, उत्कृष्ट नियन्त्रण योग्य प्रदर्शन, बन्द-लूप नियन्त्रण, उच्च विश्वसनीयता।
बेफाइदाहरू: मूल्य धेरै महँगो छ, इलेक्ट्रोनिक नियन्त्रण उपकरणले ठूलो क्षेत्र कभर गर्दछ, हालको एकल शक्ति 400kw गैर-विस्फोट-प्रूफ प्रकार भन्दा ठूलो छ, कोइला खानीहरूमा प्रयोग गर्न सकिँदैन।
बेल्ट कन्वेयरको ड्राइभ यन्त्र चयन गर्दा बेल्ट कन्वेयरको विभिन्न ड्राइभिङ मोडहरूको फाइदा र बेफाइदाहरूको माथिको विश्लेषणद्वारा:
बेल्ट कन्भेयरहरूका लागि जसलाई गति नियमन आवश्यक छैन र बेल्ट कन्भेयरको लम्बाइ 1500m भन्दा कम छ, Y-प्रकारको मोटर + टर्क सीमित गर्ने फ्लुइड कपलिंग + रिड्यूसर यसको मनपर्ने ड्राइभिङ मोड हो, त्यसपछि घुमाउरो मोटर + रिड्यूसर (नियन्त्रण मोड भनेको घुमाउरो मोटर स्ट्रिङ धातु प्रतिरोध हो);
यदि बेल्ट कन्भेयरको लम्बाइ 1500m भन्दा लामो छ भने, Y-प्रकारको मोटर + CST ड्राइभ यन्त्रलाई मनपर्ने ड्राइभिङ विधि हो, त्यसपछि Y-प्रकारको मोटर + स्पीड-रेगुलेटिङ फ्लुइड कपलिंग + रिड्यूसर।
बेल्ट कन्भेयरको ट्राफिक भोल्युम धेरै परिवर्तन भएको अवस्थामा र गति नियमन आवश्यक छ भने, फ्रिक्वेन्सी रूपान्तरण गति नियमन मोटर + रिड्यूसर यसको मनपर्ने ड्राइभिङ विधि हो, त्यसपछि क्यास्केड गति नियमन + घुमाउरो मोटरको रिड्यूसर।












